
Piab develops vacuum gripper tool for bags
Smart solutions organisation Piab has launched new software for the 3D printing of configurable bag grippers.
Piab’s new Customizable Bag Gripper (CBG) design tool is a software programme that allows customers to design/configure lightweight vacuum grippers for the handling of bags and pouches weighing up to 2kg.
According to the company, the optimally designed vacuum gripper tools for grip on specific bags or pouches can be realised within two minutes.
Josef Karbassi, vice president of Piab’s automation division, says, ”Our customers can now design their own unique gripper tools for even the most challenging of applications with bags or pouches that are really very tricky to get a grip on. And it is just a two minute job.”
The “two minutes-to-design” CBG tool saves days, or even a week, of engineering work, resulting in huge cost savings for robot/system integrators or end-users needing new vacuum gripper tools for their bag/pouch handling robots, the company says.
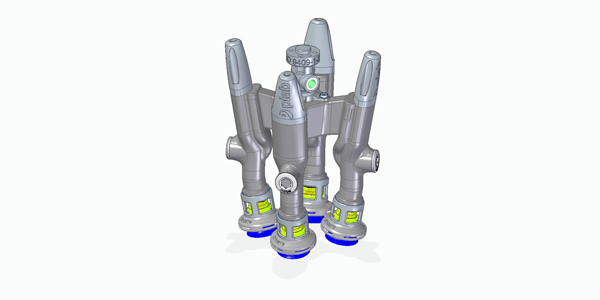
It comes with fully decentralised (one per cup) dust proof SX12 COAX vacuum generators, piGRIP “bag-lip” suction cups, stabilisers around the cup, and an automatic quick-release function.
Once finished with their designs, users click on the “send for a request” button alerting Piab’s 3D print gripper team of experts, who will get in touch to confirm the design before starting production using the automatically generated and protected high quality 3D print file. As an additional service a 3D download is available to customers as well as a unique code for the configured gripper.




